GloFAS Global Flood Monitoring (GFM)
In 2021, a new operational, near real-time global flood monitoring (GFM) was integrated into GloFAS. The new
GFM provides a continuous monitoring of floods worldwide by immediately processing and analyzing all
incoming Copernicus
Sentinel-1 Synthetic Aperture Radar (SAR) satellite data. Being a fully automated system, one of the
strengths
of the GFM is the high timeliness of its products. Secondly, the implementation of three independently
developed
state-of-the-art satellite flood mapping algorithms, underpins the robustness and high quality of the
derived
flood and water extent maps.
How are GFM’s products generated?
GFM products are computed through the application of a set of flood detection algorithms to the satellite
data retrieved by Sentinel-1, a Copernicus constellation of two polar-orbiting satellites, operating day
and night performing C-band synthetic aperture radar imaging, enabling them to acquire imagery regardless
of the weather.
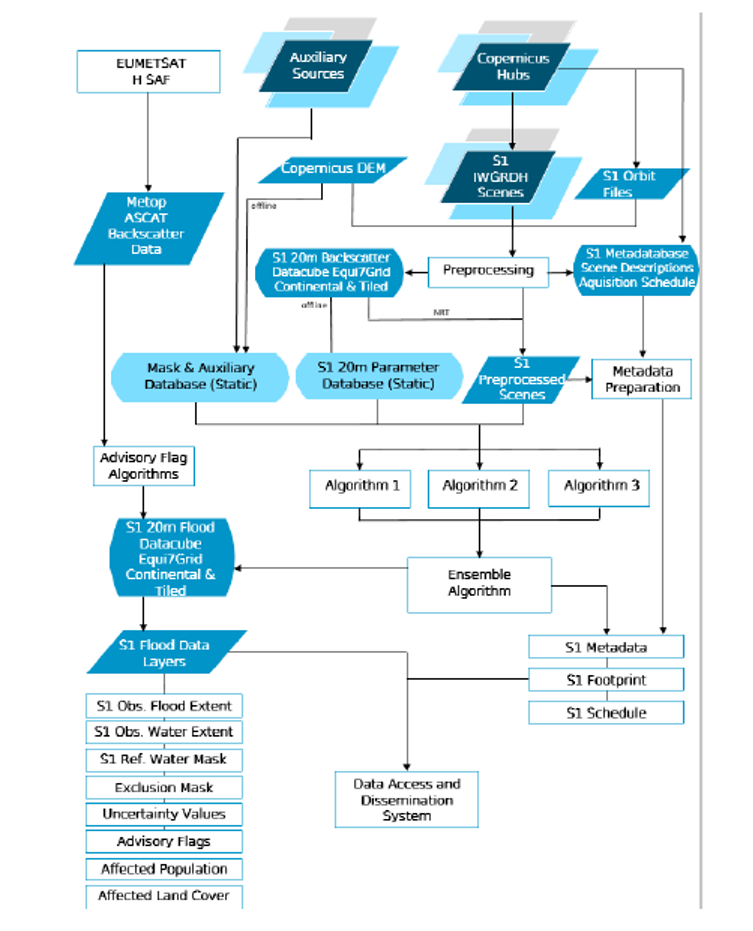
The incoming Level-1 Sentinel-1 datasets then undergo the preprocessing routines before being forwarded to
the algorithms for water and flood extent detection. Sentinel-1 data are acquired in Interferometric
Wide-swath mode and Ground Range Detected at High resolution (Sentinel-1 IW GRDH). The GRD products consist
of focused SAR data that has been detected, multi-looked and projected to ground range using an Earth ellipsoid
model, and phase information is lost. The resulting product has approximately square spatial resolution pixels
and square pixel spacing with reduced speckle at the cost of worse spatial resolution. In this case the raw
backscatter amplitude is sampled with a 10x10 m pixel size. Due to their higher sensitivity in differentiating
water from non-water surfaces only VV-polarization data are considered. The output of the preprocessing is
Analysis-Ready-Data (ARD) that is formatted and gridded, and immediately forwarded to GFM flood detection
engine where three algorithms run in parallel to compute the near-real time flood mapping products.
The first algorithm is HASARD, developed by Luxembourg Institute of Science and Technology (LIST), is based
on a scientifically validated and patented technology enabling a systematic, automatic, and high-accuracy
monitoring of water bodies using Sentinel-1 data. The algorithm uses a highly innovative sequence of
hierarchical image splitting, statistical modelling and region growing to delineate and classify areas that
changed their flooding-related backscatter response between two image acquisitions from the same orbits.
German Aerospace Centre (DLR )’s Alg2 automatically-identifies flooded areas in the SAR data using hierarchical
tile-based thresholding and the optimization of the classification by combining various information sources
using fuzzy-logic theory and region growing.
Alg3 (Technische Universität Wien, TUW) fully exploits the entire Sentinel-1 signal history within the data cube,
realized by a set of a-priori computed statistical parameters layers that provide a highly accurate
characterization of Earth’s land surface at pixel level, as well as of the incidence angle dependency in
respect to the Sentinel-1 mission. With those parameters as input, and with the mathematical legacy of Bayes,
the water delineation procedure can be designed computationally relatively slim and is hence most suitable
for global operations in NRT.
Finally, the ensemble flood mapping is computed. This “consensus” map is derived by putting together the
results of the aforementioned flood detection algorithms. To generate the combined product, each pixel is
attributed the ratio of the number of classifications as flooded to the number of algorithms that were
applied: as an example, a number equal to 1 would mean that all three algorithms agreed on its
classification as flooded. The final classification is straightforward and based on a majority decision,
i.e., a pixel is accepted as flooded when at least two algorithms classify it as water. As a result, all
other pixels of the Sentinel-1 footprint are classified as unflooded.
Which products does GFM offer?
GFM computes on a regular basis 11 different flood-related products, accessible via the hydrological layer
tab of the GloFAS map viewer:
-
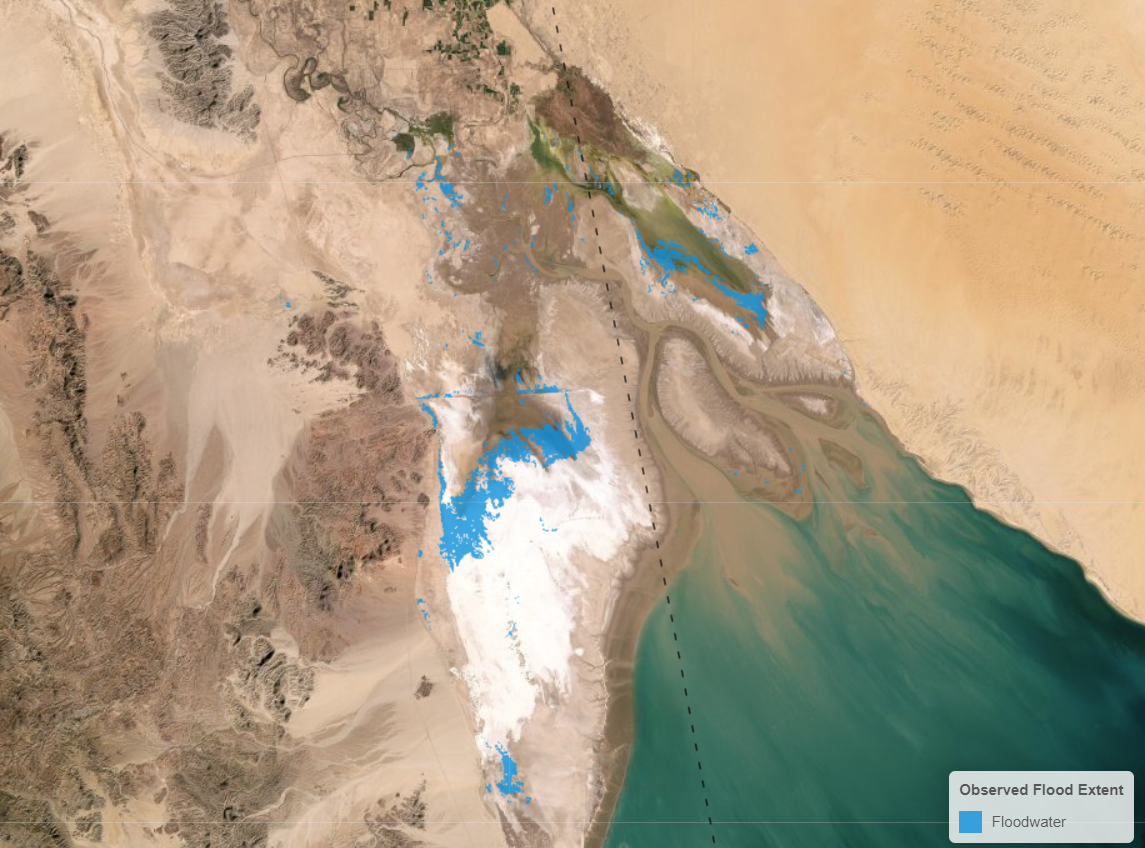
The Observed Flood Extent: is the composite of the flooded areas mapped as the difference between
S-1 observed water extent and the reference water mask The outputs of three algorithms (namely,
HASARD, ALGORITHM2 , and ALGORITHM3) running in parallel are systematically combined into a single
product (i.e. consensus map). To generate the combined product, each pixel is attributed the ratio
of the number of classifications as flooded to the number of algorithms that were applied: a number
equal to 1 would mean that all three algorithms agreed on its classification as flooded.
-
The Observed Water Extent identifies the pixels classified as open and calm water using Sentinel-1
SAR backscatter intensity and is derived using the ensemble flood mapping algorithm. To map water
extent pixels for a certain date, the algorithm uses as input the Sentinel-1 data overpass plus
offline-generated Sentinel-1 SAR parameters and auxiliary thematic datasets such as Exclusion Mask
and topography (e.g., DEM and HAND index)
-
The Reference Water Mask identifies the pixels classified as open and calm water, both permanent
and seasonal, using Sentinel-1 SAR backscatter intensity using an ensemble flood mapping algorithm.
Whereas the permanent water extent mapping uses as input the median backscatter of all Sentinel-1
data from a period of two years, the seasonal reference water mapping uses as input the median
backscatter of all Sentinel-1 data from a given month over a two-year period. As a result, twelve
masks are available, one per month, which includes information on the permanent and seasonal
reference water extent. This parameter database is updated once a year.

-
The Exclusion Mask indicates the pixel locations where the SAR data could not deliver the necessary
information for a robust flood delineation. It combines static effects leading to no-sensitivity in
flood mapping, water-look-alikes, strong topography and radar shadows.
-
The Uncertainty Value is the estimated uncertainty of flood mapping, for all areas outside exclusion
mask. The maps are generated along with the binary map product as a simplified appraisal of trust
in the ensemble flood extent detection approach. First, uncertainty information from each of the
individual algorithms is expressed in the same numerical range [0, 100] to ensure comparability
and to facilitate further harmonization.

-
The Advisory Flags indicates potential reduced quality of flood mapping, due to prevailing
environmental conditions (e.g., wind, ice, snow, dry soil), or degraded input data quality due to
signal interference from other SAR missions (e.g., Radarsat)
-
The Sentinel-1 Metadata layer contains the available information on the acquisition parameters of
the S-1 data used for flood detection.
-
Sentinel-1 Footprint is the image boundaries of the S-1 data used.
-
Sentinel-1 Schedule is the next scheduled S-1 data acquisition for each specific AOI.
-
The Affected Population layer provides the number of people estimated to have been affected by
floods, mapped by the spatial overlay of observed flood extent and gridded population (GHS)
-
The Affected Land Cover maps the flooded areas in terms of land use as provided by Copernicus
Global Land Cover Service

For more details on the latest GloFAS configuration, please refer to the relevant wiki pages.