Implemented by the European Commission as part of the Copernicus Programme
The Global Flood Awareness System (GloFAS) is one component of the Copernicus Emergency Management Service CEMS. It is
designed to support preparatory measures for flood events worldwide, particularly in large trans-national
river basins.
To provide information on both ongoing and upcoming flood events, GloFAS combines information from
satellites, models and in-situ measurements to produce:
GloFAS forecasts are produced using the latest ensemble of Numerical Weather Prediction (NWP) forecasts
of the ECMWF IFS. The medium- and extended-range ensemble runoff outputs are used for GloFAS forecasts, and
the long-range SEAS5 ensemble runoff is used for GloFAS Seasonal.
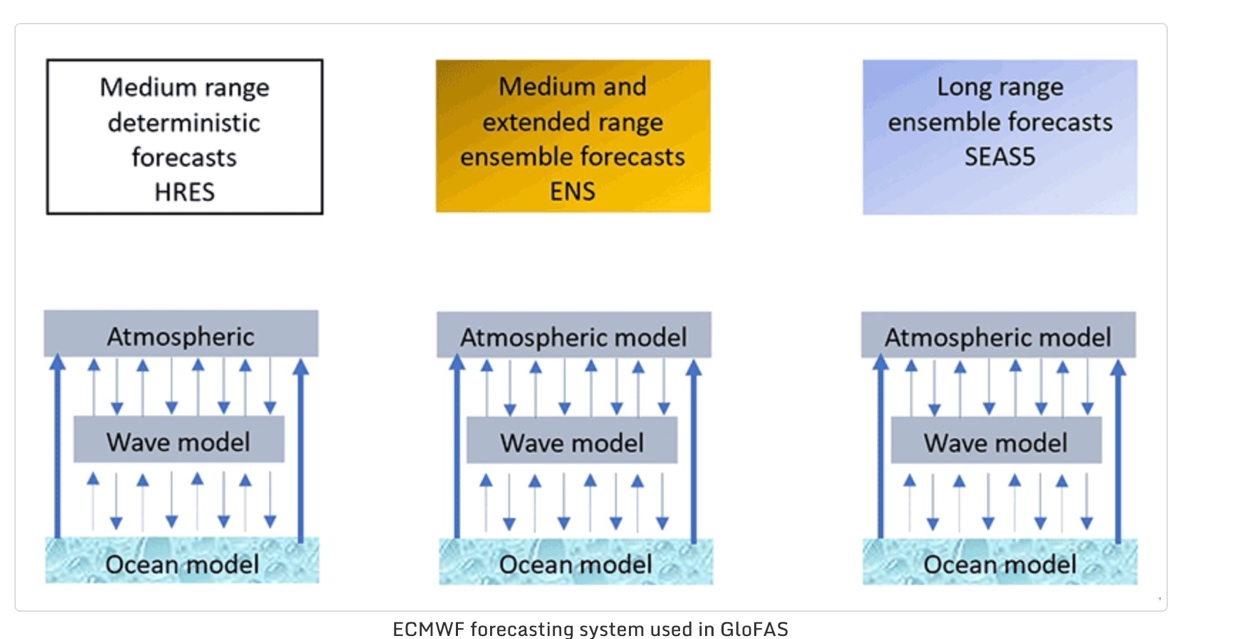
ECMWF-ENS is the ensemble forecast of ECMWF and consists of 51 members at ~18 km resolution up to 15
days, increasing to 36 km from day 16 to 30. In GloFAS 30-day, the outputs of the 00:00 UTC IFS
medium-range runs are used daily for day 1 to 15, and the latest available IFS extended range runs used
for day 16 to 30.
SEAS5 is the ensemble seasonal forecast of ECMWF (operational since 5 November 2017), and one of the
seasonal forecast models of the Copernicus Climate Change Service. It consists of 51 members at ~36 km
horizontal resolution. In GloFAS Seasonal, once a month
A hydrological model transforms the meteorological forcing forecasts into hydrological forecasts by
mimicking the hydrological land processes by a set of equations. In GloFAS, the hydrological model LISFLOOD
is used for medium- and seasonal-range forecasts.
LISFLOOD is a spatially distributed rainfall-runoff-routing model. It was first developed
at the Joint
Research Centre in 2000 and has been used for operational flood forecasting at the pan-European scale since
the beginning of EFAS. Driven by meteorological forcing data (of precipitation, temperature, potential
evapotranspiration, and evaporation rates for open water and bare soil surfaces), LISFLOOD calculates a
complete water balance at a 6-hourly or daily time step for every 5km grid cells of the EFAS domain. The
runoff produced at every grid cell is routed through the river network using a kinematic wave approach. The
model also includes options to simulate lakes, reservoirs, and water abstraction. LISFLOOD is coded using
the Python programming language and a PCRaster Python extension. LISFLOOD and its associated tools are all
open source. The LISFLOOD source code, model documentation, test catchments and tools can be found at the
LISFLOOD OS page